


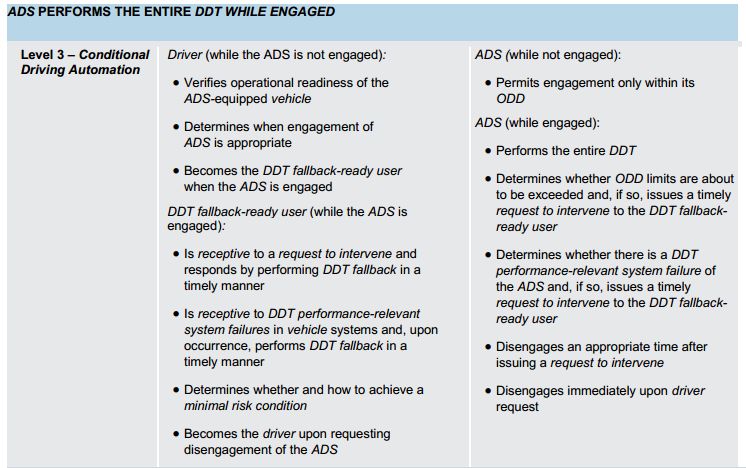
在SAE的描述中,L3級的自動駕駛,是在特定區域內持續性的執行完整DDT的任務,同時在自身自動駕駛系統出現故障時,駕駛員是能接受接管駕駛權的請求,以及當別的車輛在完成DDT相關系統任務出錯的時候,駕駛員的反應也是適度的。
能夠在ODD范圍內執行整個DDT的L3 級 ADS可能無法在所有需要DDT的情況下執行DDT后備功能,因此會在必要時發出請求,對準備好的DDT后備用戶進行干預。在提供DDT后,ADS可以持續執行至少幾秒鐘,讓準備就緒的用戶請求進行干預。然后,如果用戶認為有必要使用DDT,那么他就可以達到最小的風險條件。
一些L3級別的特性可以被設計成自動執行后備并實現最小的風險,在某些情況下的狀況,如無障礙物、相鄰的肩位存在時,但在其他情況下則不存在,如沒有這樣的路肩可用時。
因此,L3 級的分配并不限制ADS自動實現MRC,但它不能保證在其ODD情況下自動實現MRC。此外,自動化MRC在某些(但不是全部)需要它的環境中并不構成第4級功能。
在L3 級自動駕駛中,DDT后備用戶被認為能夠接受以下請求:
1、DDT備用用戶不需要監督L3 級ADS,當它被使用,預期是當ADS發出請求進行干預時,準備恢復DDT,或者執行后備,如果故障條件妨礙正常操作,則按最小風險條件處理。
2、L3 級 ADS的DDT后備用戶也可接受,車輛系統中的相關系統故障并不一定會觸發ADS發出的請求進行干預,例如車身破損或懸掛部件。無論ADS是否發出請求,面對明顯的車輛系統故障,用戶需要進行干預。
3、在發生與DDT性能相關的系統故障時,在L3 級的ADS或ADS很快退出ODD,ADS會發出一個請求,要求在足夠的時間內進行干預,讓駕駛員對手頭的駕駛情況做出適當的反應,迫使其執行DDT后備方案。
4、當DDT后備用戶對干預請求作出“適當”的回應時,在ADS不運行情況下,可能需要駕駛員以最低的風險條件處理這種情況。
舉例如下:
1、當高速公路上交通堵塞時,一個L3 級ADS功能可以執行整個DDT,但不能執行它遇到一個崩潰場景,因此發出一個請求來干預DDT后備用戶。作為回應,駕駛員接管了整個DDT的性能,以應對突發情況。
2、L3 級ADS的一個雷達傳感器出現DDT性能相關系統故障,阻止它可靠地探測車輛路徑中的目標。ADS的回應是對DDT后備用戶發出干預請求。ADS繼續執行DDT,同時降低車速,幾秒鐘后,讓DDT后備用戶以有序的方式恢復操作車輛。
3、一個具有L3 級ADS的車輛遇到一個斷裂的拉桿,這導致車輛的處理非常糟糕,給準備就緒的用戶足夠的動覺反饋,表明車輛故障需要干預。后備用戶的反應是恢復DDT,打開危險燈,將車輛拉到最近的路肩,從而達到最小的危險條件。
簡而言之,L3級的自動駕駛具備在限定環境下完整執行DDT的能力,同時駕駛員要對汽車行駛負責,無論自動駕駛系統是否工作、故障。
結語:
L3是L1L2輔助駕駛技術和L4L5級自動駕駛技術之間的橋梁,從真實的量產角度看,OEM都傾向于自動駕駛技術從低等級到高等級漸進式發展,企業的規劃和戰略也都體現了這一點。在L1普及率極低,L2技術量產尚處于萌芽階段的當下,OEM宣布的2020實現L3,是一項對新技術追求的舉措。
一方面,國內OEM有跟隨國際OEM發展的習慣性需求,另一方面國內汽車環境對國際OEM的逐漸放開,也倒逼著佛系自主OEM要奮發圖強,不能繼續躺在溫室里頤養天年。但從傳統零部件組裝廠,到散發著高科技光環的自動駕駛OEM,中間要跨過的路可不止L2->L3。
在L3的技術條件下,汽車要能具備類似于高速公路這樣限定區域內完整自動駕駛的能力,面對自動駕駛系統故障、車輛故障或突發情況,駕駛員在要盡可能最小風險接管。
這意味著L3級自動駕駛技術,在限定環境下已經擁有較為全面的感知環境、決策、控制執行的能力,系統本身也具備一定的安全冗余方案。在一定程度上,系統擁有了駕駛權。
為了達到這樣的技術,不僅僅要在L2的基礎上增強系統的感知能力,同時對地圖、定位精度也有了更高的要求,系統備份、更復雜的失效處理等等都不可或缺。

地址:深圳市龍華區東環一路天匯大廈B棟1028室
QQ:2775887586 ? ? ? ? ? TEL:0755-83422736
技術支持:凱鼎電子???粵ICP備16123236號-1
? 2010-2017 K-DING ELECTRONIC CO.,LTD All rights reserved.



