


在近日舉辦的2018年CCF-GAIR大會上,中國科學院自動化研究所復雜系統管理與控制國家重點實驗室主任、中國自動化學會副理事長兼秘書長王飛躍,談及自動駕駛目前所面臨的一些技術、法規方面的難題,很可能在未來不復存在。而另外一方面自動駕駛是一項非常好的技術,但自動駕駛技術的成熟,還有漫長的路要走。
自動駕駛之所以能重提,關鍵原因是當下的傳感器、車聯網的技術有了質的改變,因此談自動駕駛的商業化應用,才成為了可能。
從2009年開始,中國智能汽車未來挑戰賽(IVFC)每年都舉行,參賽的隊伍基本都是學院派,從國防科大、上海交大、北理工、湖南大學、西安交大、清華大學,到軍事交通學院、武漢大學、南京理工大學等等。
自動駕駛車也從最開始的比行人慢,到跟隨,超越,行駛的路況也從測試道路,標準路況,延伸到了高速公路、鄉村道路以及越野道路。
從一個高校科研、比賽的活動,走向如今的創業家開口必談的“偉大商業愿景”,自動駕駛從孤陋寡聞到家喻戶曉,用了不到數年的時間。但自動駕駛自身的技術難題,解決尚需時日。

虛擬測試為主,少量路測為輔
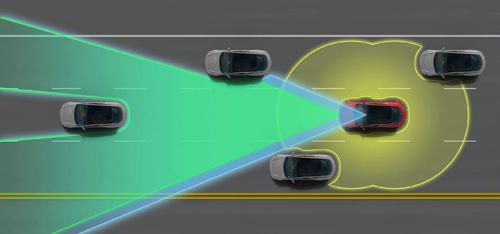
自動駕駛目前最難的問題,在于感知。即讓車輛擁有對行駛環境的探測、認知能力,從硬件上目前的做法是通過攝像頭、毫米波雷達、激光雷達等傳感器抓取環境的三維要素,以期得到環境的全面信息。但各種傳感器都各有優劣,從物理層面上探測環境所能達到的精度、距離都有限。以視覺為例,目前針對視覺計算研究匯總存在的實際數據獲取和標準成本高、難以覆蓋復雜環境、極端場景樣本稀少、訓練的模型適應性差等。這些場景的處理能力,是制約自動駕駛更進一步的核心。
自動駕駛要模仿人類對世界的感知能力,雖然可以通過各種傳感器來模仿人類的感官,但很難模擬人類的經驗、學習能力。
人在日常生活中,可以不斷地積累各種汽車的經驗知識,并在關鍵的時候產生作用,深度學習神經網絡試圖通過多層次,多維度的學習,來盡量逼近人類的學習認知能力。但計算機目前還很難舉一反三,運用經驗去靈活應對實際多變、未知的場景。
為了讓自動駕駛能夠更快的學習實際環境,多數自動駕駛公司、OEM都會希望通過實際路測來不斷積累樣本庫,以及處置突發情況的能力。但一方面實際路測成本高昂,非一般人能效仿,另一方面在實際場景中測試,會有極大的“安全隱患”。
本質上來說,自動駕駛目前還是一個實驗技術,因此如果直接投放到社會道路上,以路測養技術,是行不通的,人類會因此淪為試驗標本。
解決自動駕駛感知問題困難重重,但也并不需要為此杞人憂天。隨著車聯網的發展,5G的成熟,未來的道路將也會具有智能屬性。
屆時,汽車并不需要像如今我們所追求的那樣“敏感”,道路以及車輛信息可以在汽車間實時通達,汽車并不需要識別紅綠燈、交通事故、障礙物,即可通過智能基礎設施得到相應的信息,車與車之間也可以自由通訊,不需要檢測,都可以令行禁止,暢通無阻。
在自動駕駛的發展初期,應以虛擬測試為主,極少量路測為主。即90%的情況下是通過虛擬訓練,提升自動駕駛感知技術,而以10%的情況路測驗證。使得汽車逐漸在描述車輛、預測車輛、規劃車輛方面,技藝日臻完善。
自動駕駛也需要農村包圍城市
自動駕駛技術尚未成熟,前景遙遠,那么對于自動駕駛公司而言,該怎樣才能走出一條切實可行的道路呢?
自動駕駛的商業化應用,應從小處入手,間而推廣。簡而言之,就是選取特定的場景,安全隱患下,投入較小,然后以小規模無人車應用試驗,積累足夠的經驗。這些應用場景中,包括園區、小區、港口、特種行業,行業也可以涵蓋物流、配送、礦山等。這種場景基本環境可控,人車以及無人車與普通車可以進行較好的區分,首先可以隔離無人車對人的安全隱患。

地址:深圳市龍華區東環一路天匯大廈B棟1028室
QQ:2775887586 ? ? ? ? ? TEL:0755-83422736
技術支持:凱鼎電子???粵ICP備16123236號-1
? 2010-2017 K-DING ELECTRONIC CO.,LTD All rights reserved.



